Decision Trees
Decision Trees
- General Information
- Decision Trees Components
- Criteria for nodes splitting
- Overfitting/underfitting concepts
- Decision Trees pruning
- Decision Trees types
General Information
Decision Trees is a supervised non-parametric classifier that takes as input a vector of attribute values and returns a decision
Main characteristics
- Input/output values can be both numerical and categorical
- Missing values are allowed
- Classification structure is explicit and easily interpretable (Friedl & Brodley, 1997)
Decision Trees definition
“A classification procedure that recursively partitions a data set into smaller subdivisions on the basis of a sets of tests defined at each branch (or node)” (Friedl & Brodley, 1997)
Decision Trees example
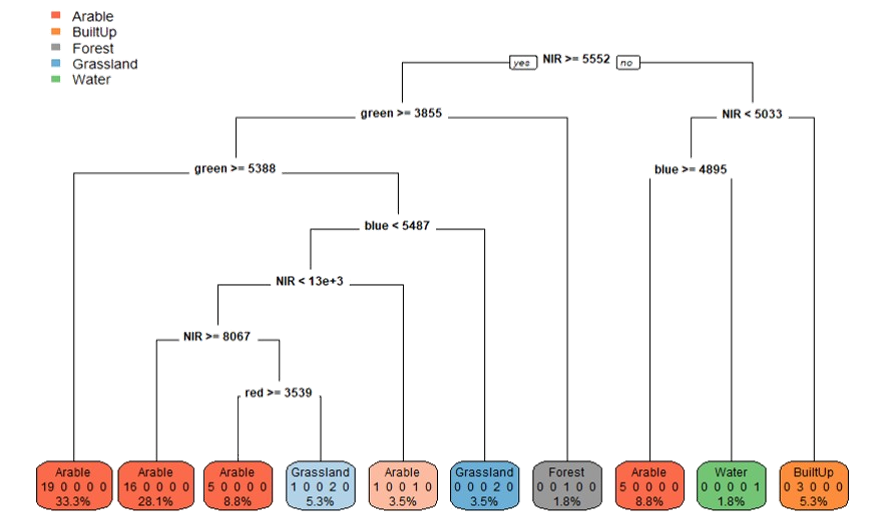 Decision Trees classification model generated in R using PlanetScope image as input (Digital Number-DN).
Decision Trees classification model generated in R using PlanetScope image as input (Digital Number-DN).
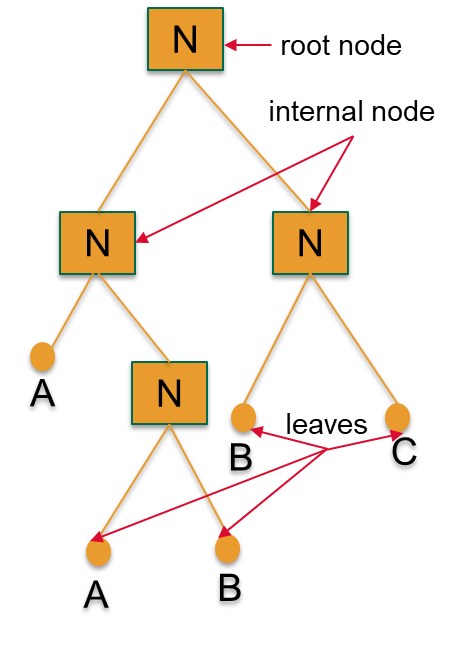
Decision Trees components
- Nodes: testing different attributes for splitting
- Edges: connecting to the next node or leaf
- Leaves: terminal nodes predicting the outcomes
Decision Trees types
- Classification problems: predicting discrete values
- Regression problems: predicting continuous values
Can you give examples of classification and regression problems?
How to construct Decision Trees?
The mains steps are:
- select the best attribute as the root node
- for each value of this attribute, create new child node
- split samples to child nodes
- if subset is pure, then terminal node
- else: continue splitting
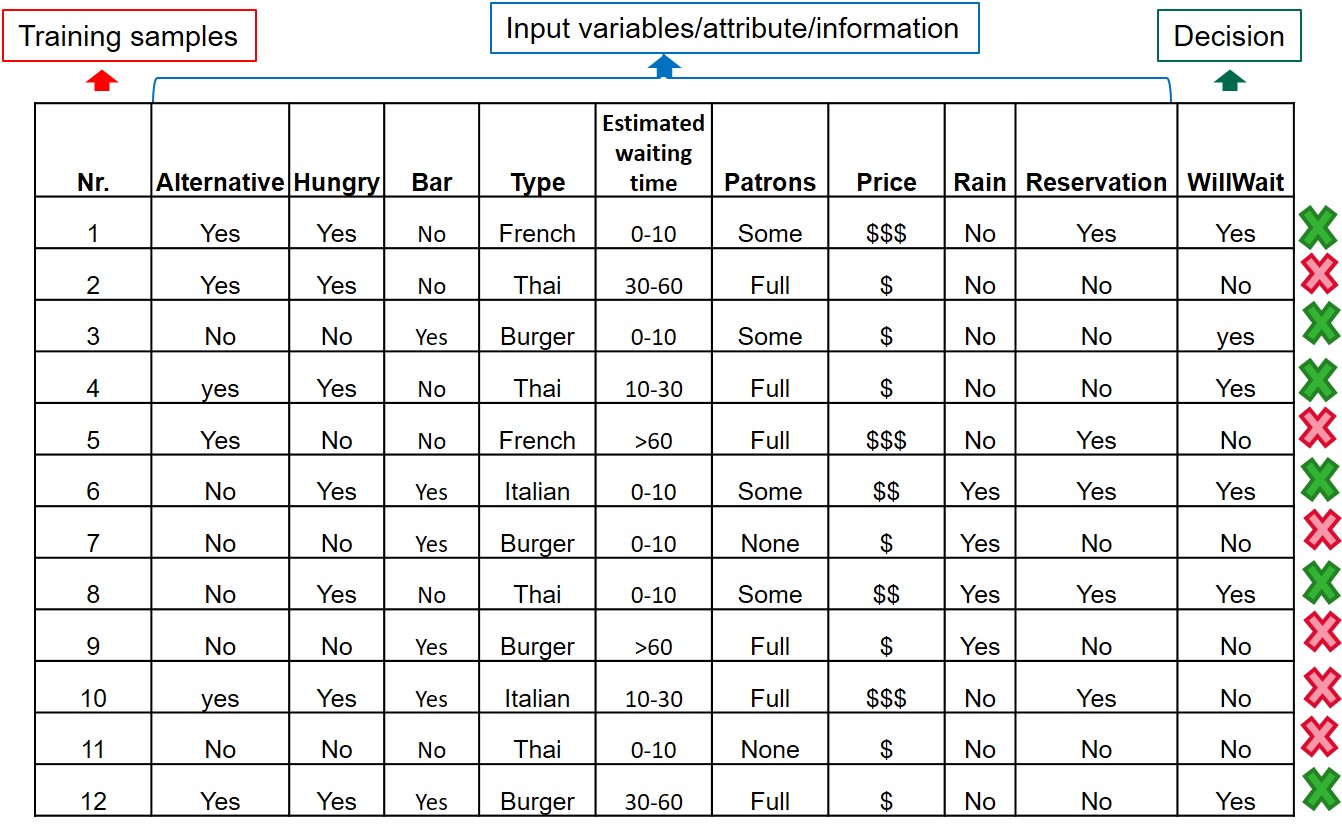
Input variables example
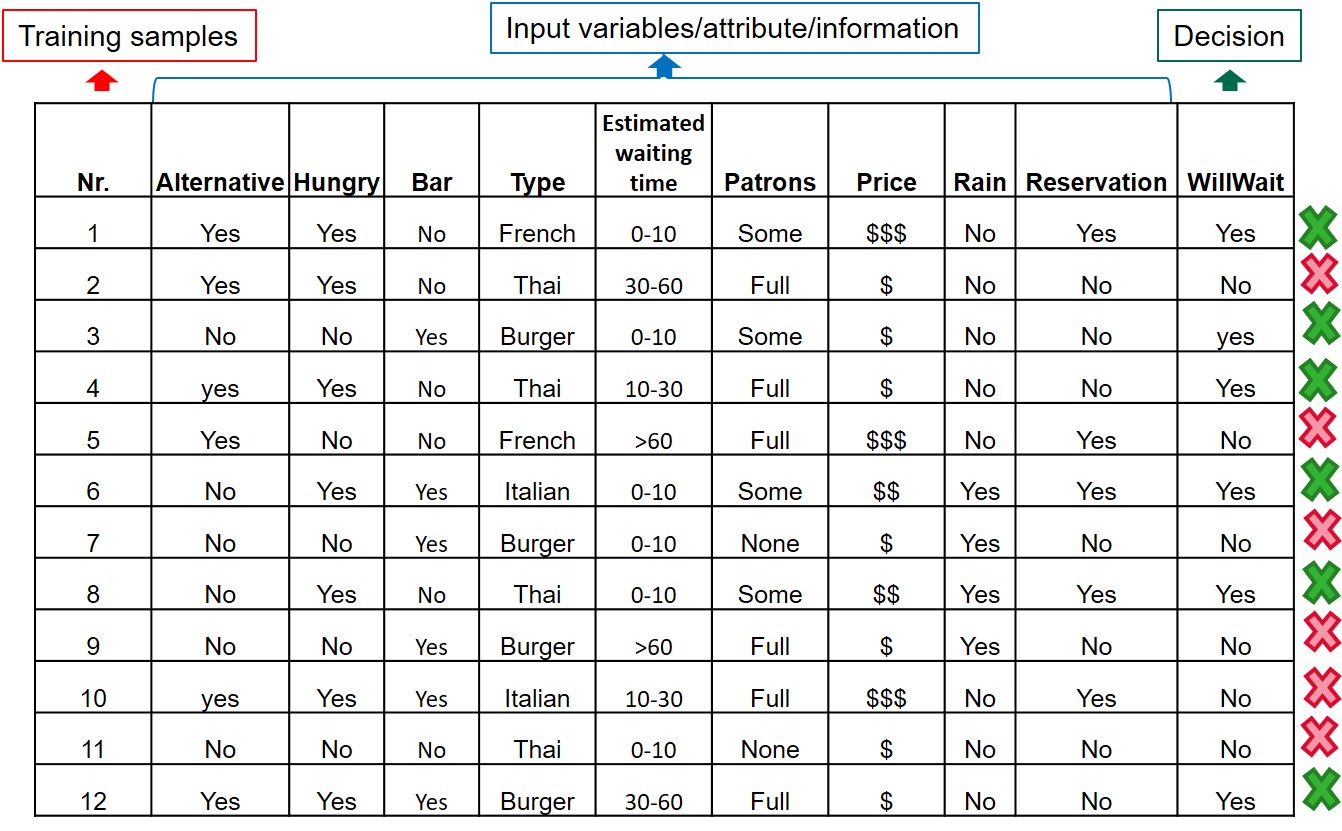 Source: Artificial Intelligence: a modern approach (Stuart Russel and Peter Norvig, 2009)
Source: Artificial Intelligence: a modern approach (Stuart Russel and Peter Norvig, 2009)
Decision Trees example
(contructed based on the previous presented variables)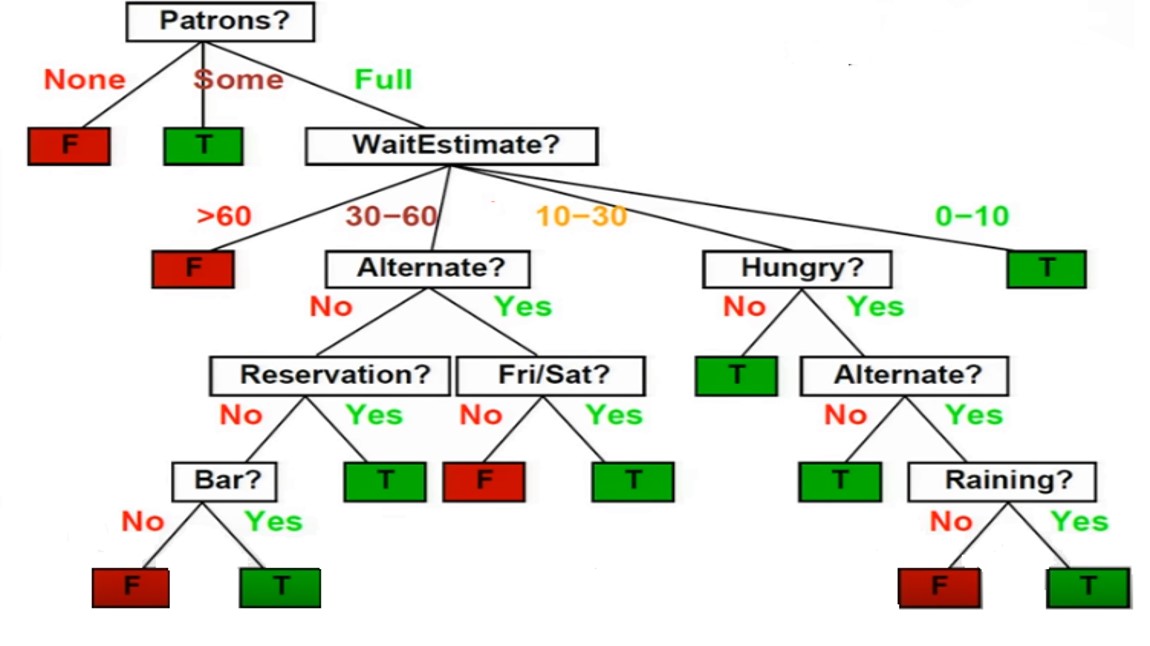 Source: Artificial Intelligence: a modern approach (Stuart Russel and Peter Norvig, 2009)
Source: Artificial Intelligence: a modern approach (Stuart Russel and Peter Norvig, 2009)
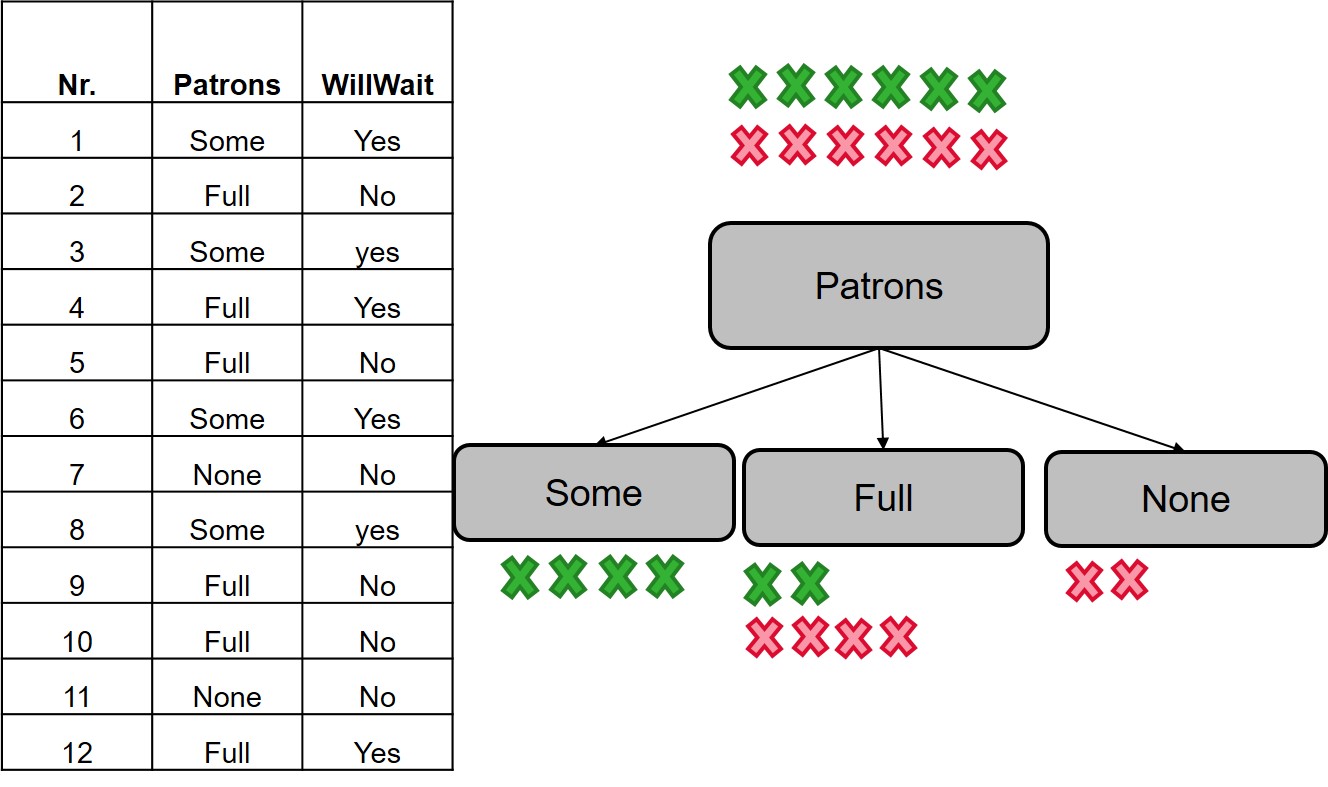
How to select the best variable as the root node?
Patrons variable
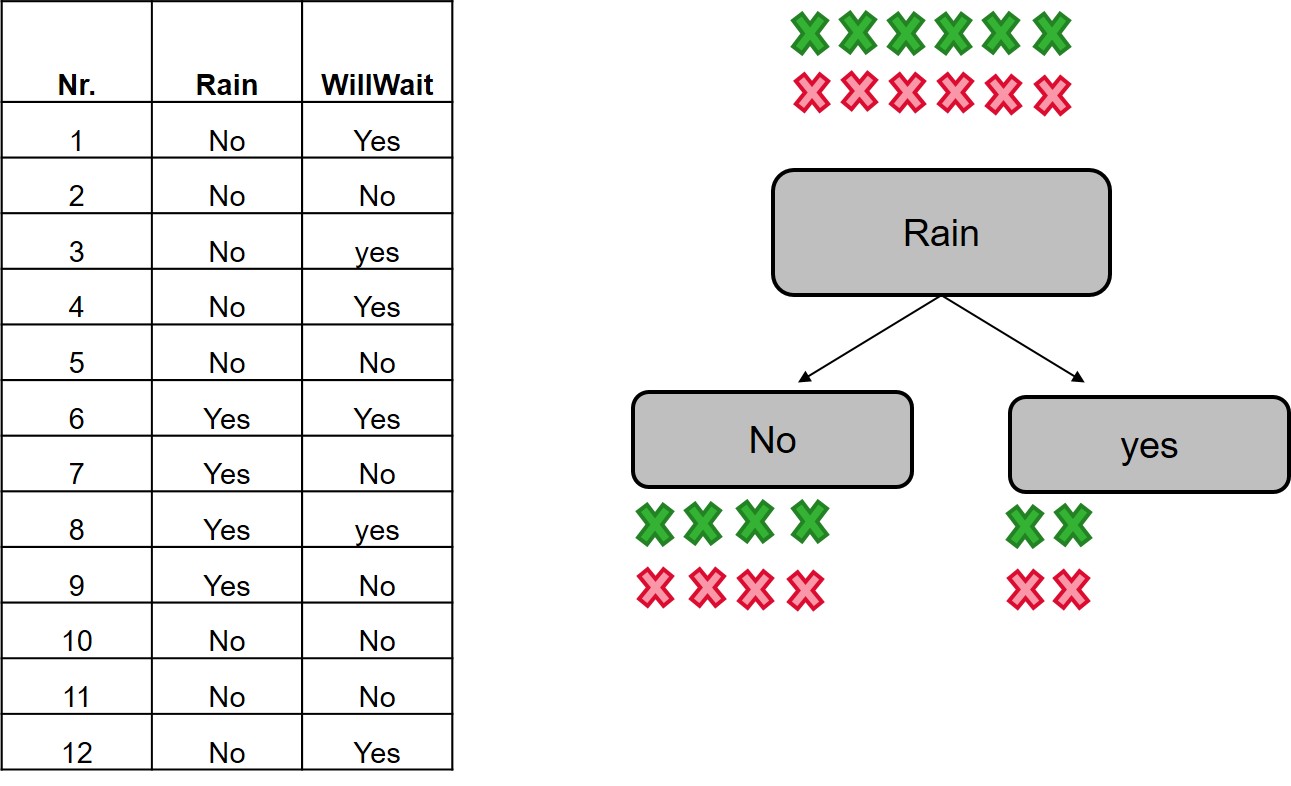
Rain variable
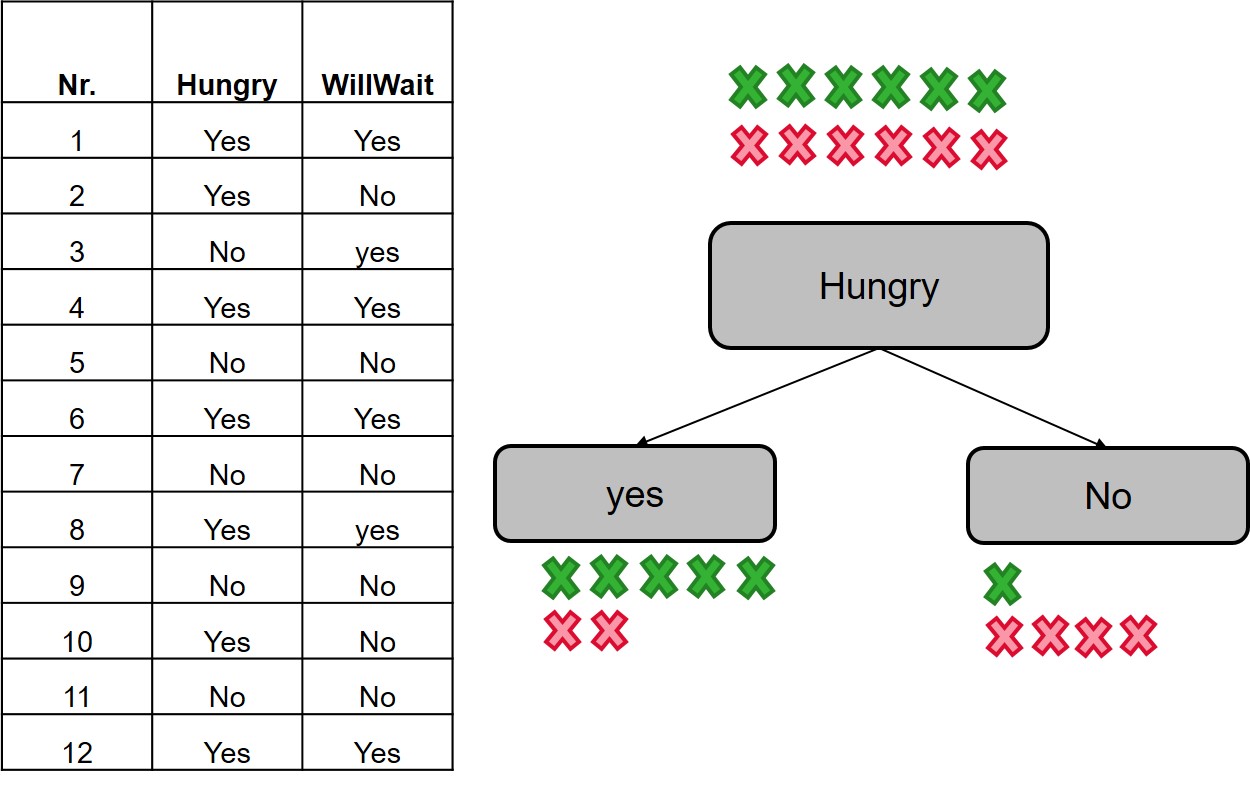
Hungry variable
Measures used to split the tree nodes
The splits defined at each internal node of decision trees are estimated from training data by using a statistical procedure
- Information gain
- Variance reduction (regression problem)
- Gini impurity
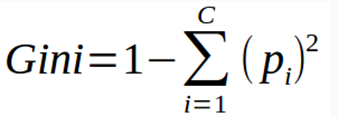
𝑝𝑖 = probability of an object being classified as a particular class
Information gain
Entropy
- a measure of uncertainty/how pure a subset/tree node is
- units used to measure it: bits

p = number of positive examples
n = number of negative examples
Information gain (II)
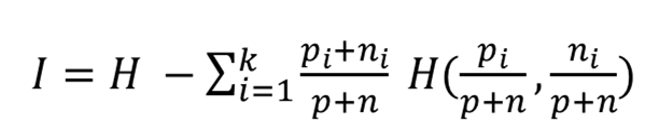
H = entropy
k = values an attribute can take
Calculation of information gain - example
Entropy

Calculation of information gain for 'patrons' variable

Calculation of information gain for'patrons' variable (II)


Calculate the information gain when the variable ‚type‘ is used for splitting the tree nodes
Splitting tree nodes using continuous variables
There are two main options
- Binay decision = consider all possible splits according to the attributes values (-)
- Discretization: ordinal categorical feature (+)
Overfitting and underfitting
Overfitting: learning noise on top of the signal
- Presence of noise
- Lack of representative samples
Underfitting: the model is too simple to find the patterns in the data
Optimal size of decision trees
Too large: overfitting
- Poor generalization to new samples (low bias/high variance)
overfitting
Too small: underfitting
- Poor fit to the data (high bias/low variance)
Underfitting
Optimal Decision Trees
- Do not grow a tree that is too large
- Pruning: reducing the size of the decision tree
Decision Trees pros and cons
Pros
- Not a black-box classifier: i.e. users can easily understand the decisions
- Can handle both categorical and numerical data
- Can handle missing data
- Irrelevant attributes are easily discarded
- fast
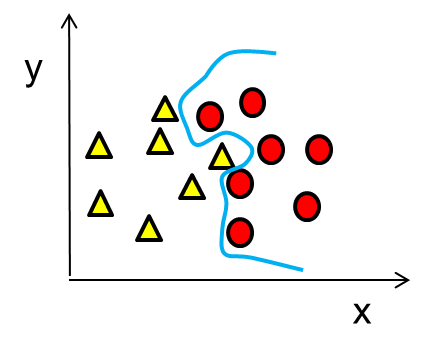
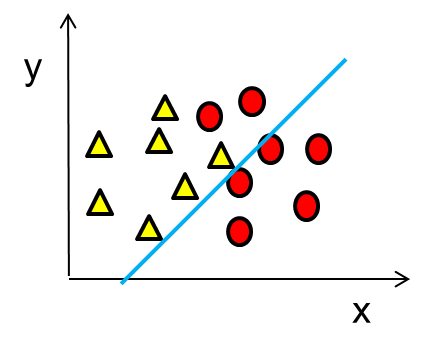
Cons
- Axis-aligned splitting of data
Decision Trees types
'Simple' decision trees
- Classification and Regression Tree (CART) (Breiman et al., 1984)
Ensemble of Decision Trees (weak learners):
- Boosting: weighted average of the results
- Bagging: averaging the results for the end prediction: e.g. Random Forests (Breiman, 2001)
Summary
- Non-parametric and transparent classifier
- Addresses both classification and regression problems
- Different options for splitting the decision trees nodes: information gain, Gini impurity, variance
- Best decision trees : overfitting/underfitting problems
- Popular implementations of decision trees: CART, Random Forests
Reference list
Breiman, L. (2001). Random Forest. Machine Learning, 45
Friedl, M.A., & Brodley, C.E. (1997). Decision tree classification of land cover from remotely sensed data. Remote Sensing of Environment, 61, 399-409
Russell, S., & Norvig, P. (2009). Artificial intelligence: a modern approach. (3 edition ed.). Pearson